BLOG
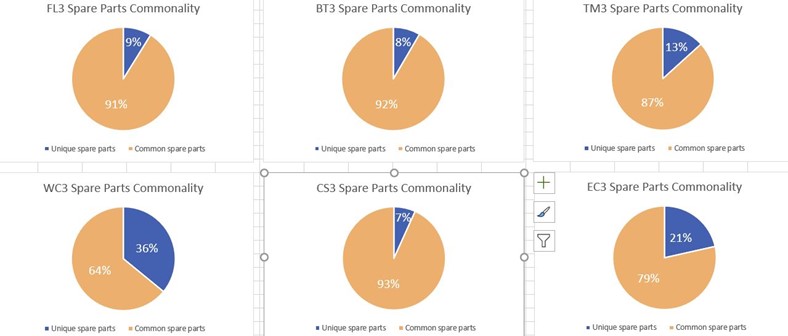
Common ground – We design it in
October 6th, 2023 Efficiencies in maintenance and parts replacement is what makes parts commonality across a fleet so compelling for...
Read More
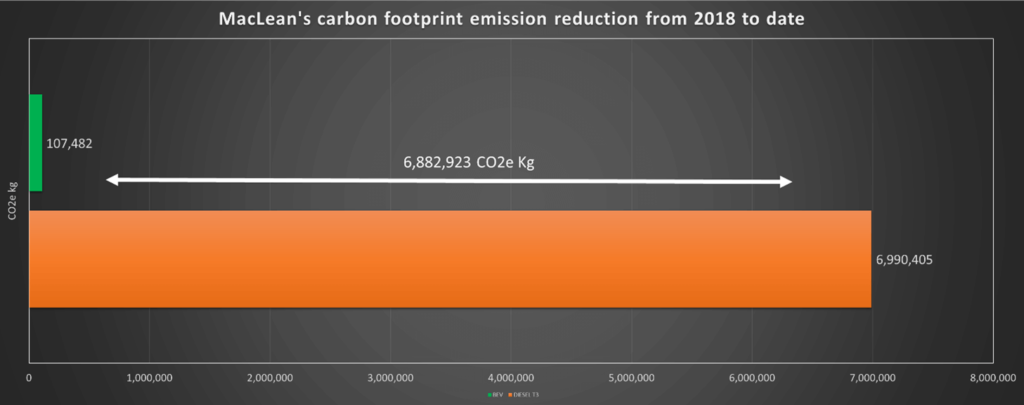
Taking the ‘MacLean Way’ to the new economy
August 8th 2023 ‘Decarbonization’ is making a good case right now for being the word of the decade, maybe even...
Read More

Reminiscing the past… the first 50 years sets up the next 50
A decade ago, one of our former colleagues, since retired but always in our hearts (thank you, Roger), had the...
Read More

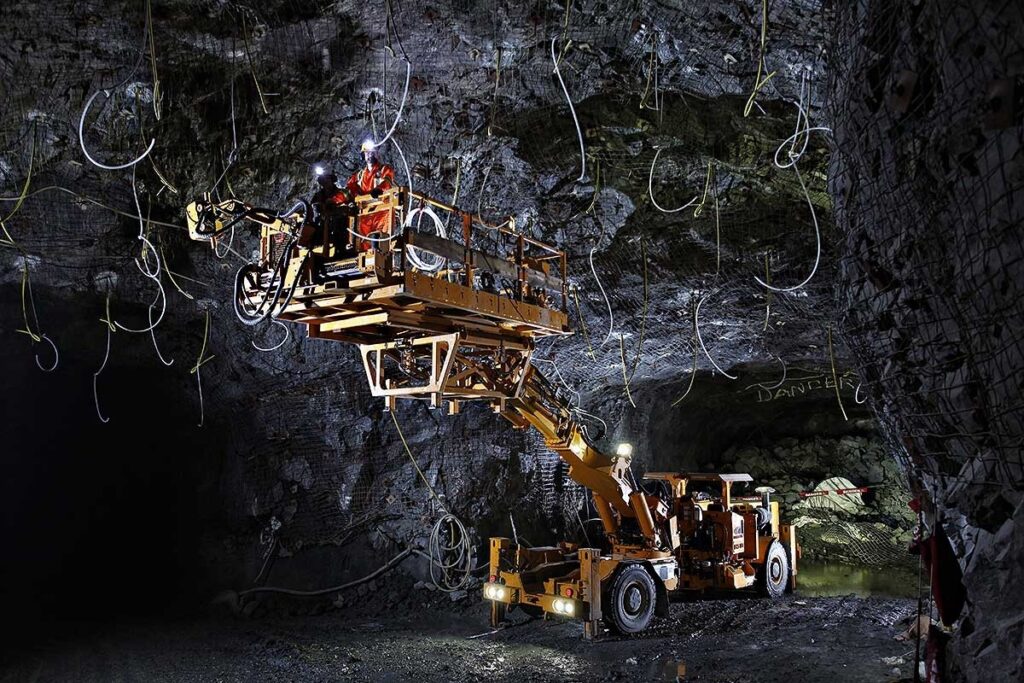
Bolting the Face – The Newest Capability of the MacLean Bolter
As mines go deeper in pursuit of increasingly scarce ore, higher ground stress is unavoidable. To combat the safety risks...
Read More

VR training – try it on
I've just returned from two mining conventions in Latin America, the Perumin show in Arequipa in September and the Expo...
Read More

The MacLean digital twin takes shape
When you participate in enough mining conferences, certain themes get lots of airtime but there's usually a major lag between...
Read More
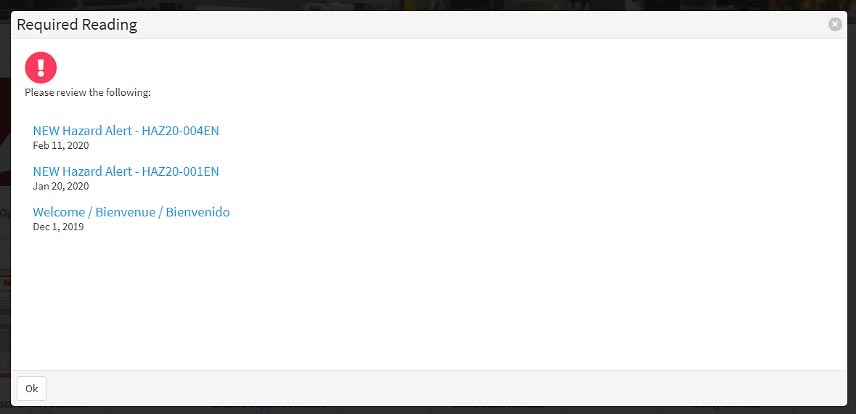
On the subject of required reading (and nothing to do with your book club)
When we launched our cloud-based MacLean-Documoto platform last year, we knew our customers would be excited about the change because it offered...
Read More
Tomorrow, our reward for being safe today
MacLean Engineering is well known for providing innovative solutions to its underground mining customers across the globe. Designing and building...
Read More

EV material haulage – zero emissions mining and harnessing the potential of potential energy
Since launching our Fleet Electrification Program in 2015, MacLean has conducted ramp trials with a battery electric, on-board charging material...
Read More

Let’s talk about commonality
MacLean now has fleets of ground support and utility vehicles at underground hard rock mines around the globe. Until recently,...
Read More

The immediate usefulness of EV
How the underground mining industry can get to transformational change, incrementally Underground mining is at an interesting place right now,...
Read More

EV Momentum Inevitability
CIM Vancouver is a wrap and once again the national mining convention brought together a wide cross-section of the Canadian...
Read More

The All-Electric Mine of the Future, and the Need for Good Roadbeds NOW
MacLean doesn’t do graders. We didn’t do graders, that is, until we launched our EV Series of long battery life,...
Read More

UX meets BEV
The recent GMSG summit in Stockholm was another confirmation that the whispers of the digital mining revolution are gathering steam...
Read More

The Robots are Coming
The space and time between semi-mechanization and full automation As a manufacturer that established its name in large part around...
Read More

What’s in a number? The economics of battery power in underground mining
One of Oscar Wilde’s many famous lines is that a cynic knows the price of everything but the value of...
Read More
PDAC 2017 And Maclean Mining Innovation: Full-Fleet Electrification & A New Utility Vehicle for High-Reach, Heavy-Load Applications
Collingwood, Ontario, March 3, 2017 – On the heels of showcasing a battery powered 975 Omnia Scaler-Bolter at MINE Expo...
Read More
